If nodes could fly
Autonomous Robotics Ltd. (ARL), a subsidiary of Thalassa Holdings, has been working on what it calls Flying Nodes. These would remove the need for a deployment platform to lay the nodes on the seabed, i.e. the ROV and its ancillary support or rope deployment systems. Flying Nodes will speed up deployment while retaining high positioning accuracy using Ultra-Short BaseLine (USBL) systems and enable more flexible survey geometries compared with cable-based deployment. To put the challenge in context, a single marine seismic survey can involve thousands of nodes being placed on the seabed, complete with hydrophone and geophones to pick up the signals echoed out of the ground from the seismic source vessels.
ARL has been working on its Flying Nodes since 2013, when it bought tech firm GoScience. Today, its design comprises of 600mm-long, 580mm-wide and 300mm-high, winged nodes, like a small autonomous underwater vehicle (AUVs), each housing three geophones and a hydrophone. The idea is that the system can be containerised for deployment from vessels of opportunity. Groups of nodes would be deployed in large numbers via cages that are lowered from the vessel to about 30m deep — in up to sea state 5 and 3 knot surface current. They swim out of the cage and, using variable buoyancy and mass distribution, supported by three thrusters (forward/aft and vertical) and a USBL positioning system, travel to pre-programmed positions on the seabed.
It’s not all seismic
ARL currently has two system configuration concepts; a compact system of up to 500 nodes and a full system of up to 3,000 nodes.
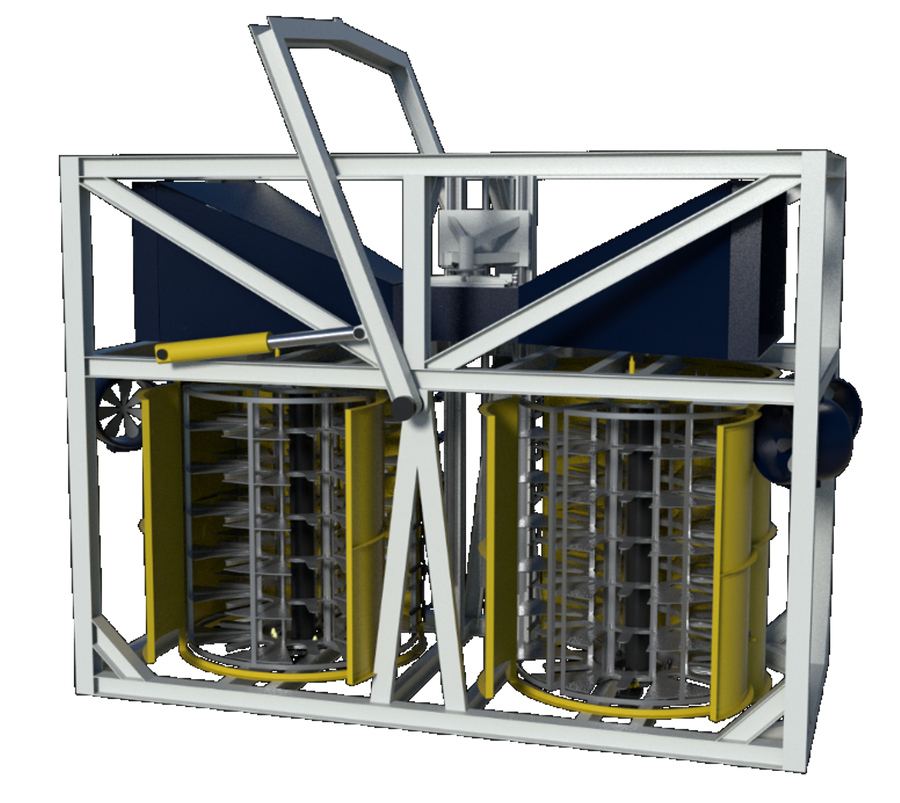
The full system, for reservoir and exploration OBS application, would comprise of dual
Up to 1,200 nodes a day could be deployed using this system compared to
The compact system would operate using a single USBL system onboard the combined node deployment and source system vessel and could be used for towed streamer infill, injector monitoring, water quality measurements and geohazard monitoring. For this, ARL has developed a concept design for a 12 node D&R cage, which is based on passive sled towed bodies used in oceanography.
The nodes are to be equipped with batteries to allow for
In 2018, ARL started working with RGU on swarm localisation systems, including moving from an initial seabed position to another.
Sea trials to prove seismic acquisition
The company performed sea trials around Plymouth Sound (UK) in 2018. These were the first autonomous sea trials of the Flying Node and successfully demonstrated autonomous flight. During the trial the ability for the node to take-off and land on the seabed was also shown. “We were pleased with the results of the trial, which demonstrated that the node was controllable, performed the functions required of it and met its performance requirements for example speed and endurance,” says Grant
In 2019, a seismic field trial successfully demonstrated the node’s ability to acquire high quality OBN seismic data, says Grant. The trial took place in Portland harbour (UK), a small 60cu airgun was used to fire over 5000 shots. The data captured by the Flying Node was then compared to an industry standard OBN. Following those trials, ARL is now working on its pre-production prototype Flying Node development and is in discussion with potential strategic partners to bring the system to market in several target market areas.
Additional markets
ARL has extended its development efforts to defence applications, “which can make use of the node’s ability to carry a sensor payload to the seabed where it can remain covertly acquiring information. An example application for Flying Nodes could be the protection of critical national infrastructure, for example subsea telecommunication cables and oil and gas subsea infrastructure,” says Grant.
There is also interest in using the Flying Nodes in offshore renewable energy, where seismic data is required for installation or management of systems and monitoring of storage sites for carbon capture and storage, says Grant. Other environmental applications could include seabed data monitoring and detection of vessels entering sub-sea exclusion areas.